Көп сенсорлы табу технологиясы
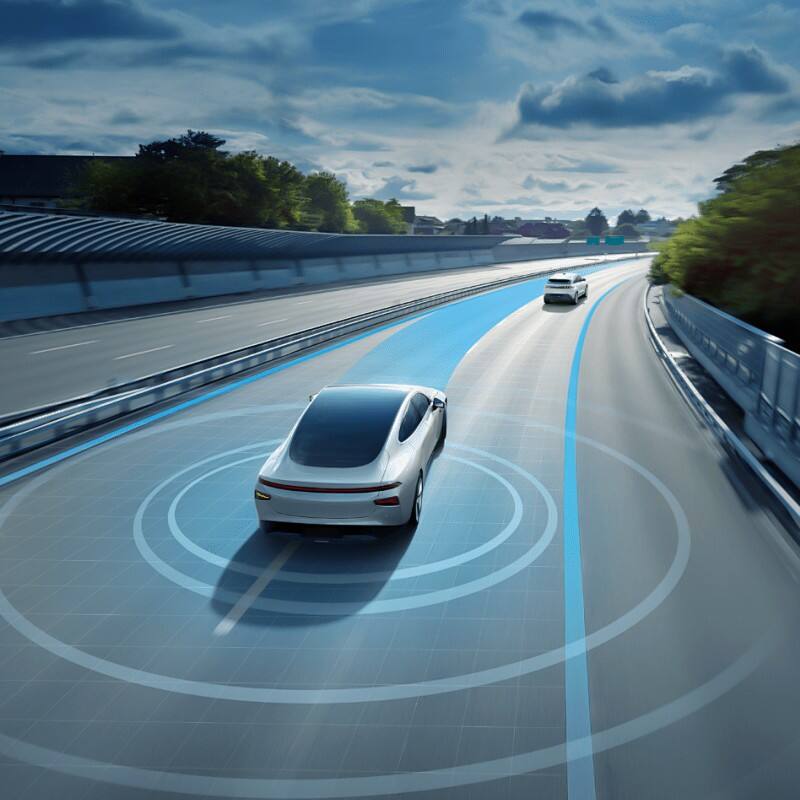
Қауіпсіздік аймағын бақылау жүйесі автомобильдің қауіпсіздігін қамтамасыз ету бойынша ең соңғы жетістіктерді көрсететін, көптеген сенсорлардың бірлескен жұмысына негізделген инновациялық технологияны қолданады. Бұл жүйе кемелеткен радарлық жиынтықтар, ультрадыбыстық сенсорлар мен алдыңғы қатарлы камералық жүйелердің өзара үйлесімді жұмысы арқылы автокөліктің айналасында тереңдетілген бақылау желісін құрады. Бұл кешенді сенсорлық интеграция кез келген ауа-райы жағдайында, жарықтың болуы немесе болмауында, сонымен қатар келуші көлік түріне қарамастан, ешқандай потенциалды қауіп туралы хабар бермей қалмайды. Радарлық сенсорлар жоғары жиілікті диапазондарда жұмыс істейді және жаңбыр, қар, тұман мен шаң арқылы өте алады, осылайша көру негізіндегі дәстүрлі жүйелер қателесуі мүмкін жағдайларда да тұрақты бақылау қабілетін сақтайды. Бұл сенсорлар келуші көліктердің қашықтығын, жылдамдығын және траекториясын дәл өлшей алады, осы ақпарат негізінде жүйе соқтығысу қаупін өте жоғары дәлдікпен есептей алады. Ультрадыбыстық компоненттер бақылау қабілетін тағы бір деңгейге көтереді, әсіресе мотоциклдер немесе велосипедтер сияқты кішірек объектілерді анықтауға тиімді, олар әдетте басқа жүйелерде қалып қояды. Камералық элементтер көріністі растау мен жақсартылған объектілерді тану қызметін атқарады; олар жасанды интеллект алгоритмдерін пайдаланып, нақты көліктерді шектеу бағандары немесе жол белгілері сияқты қозғалмайтын объектілерден ажыратады. Бұл әртүрлі бақылау әдістерінің бірігуі жүйенің өзіндегі қауіпсіздік аймағын жоюға мүмкіндік береді: егер бір түрлі сенсор кедергіге ұшыраса немесе басқаша тосылса, басқа сенсорлар ұзақ уақыт бойы сенімді бақылауды қамтамасыз етеді. Алдыңғы қатарлы сигналды өңдеу алгоритмдері барлық сенсорлардан түскен деректерді бір уақытта талдайды, ақпаратты өзара салыстырып, жалған хабарландыруларды болдырмауға тырысады, ал нақты қауіптердің туындауы жағдайында қажетті ескертпелер беріледі. Жүйе қозғалыс жылдамдығына, жол жағдайына және қозғалыс тығыздығына қарай бақылау параметрлерін үнемі реттеп отырады, әрбір нақты жүргізу жағдайы үшін өнімділікті оптималды деңгейге көтереді. Бұл технологиялық кемелдік жүйенің нақты қауіпті көліктерді және жеткілікті аралықпен қатарлас жолда қауіпсіз орналасқан көліктерді ажырату қабілетіне де созылады.