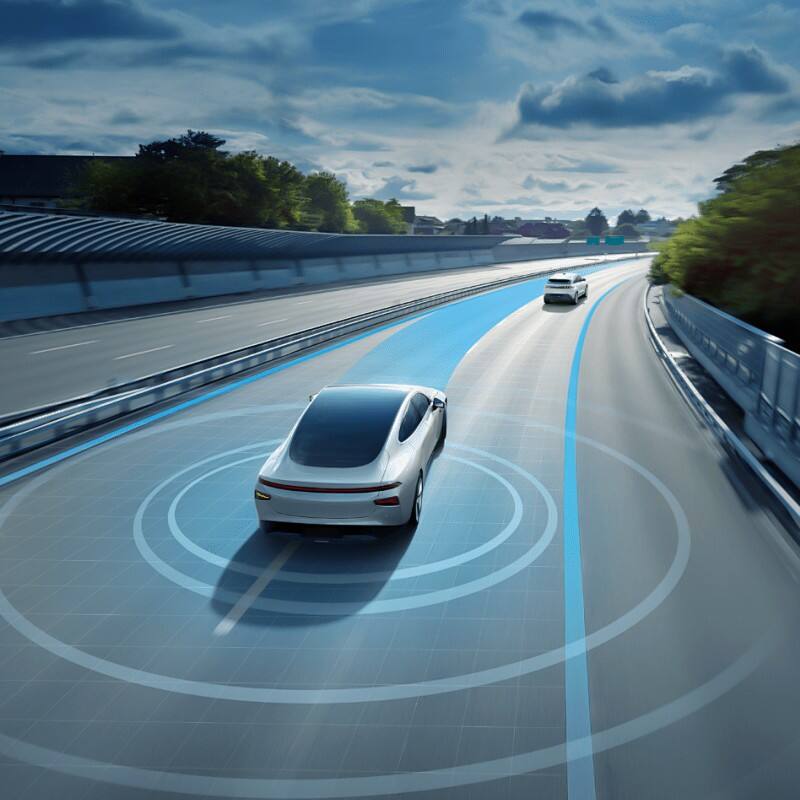
Gelişmiş Radar Tespit Teknolojisi, Kapsamlı Kapsamı Sağlar
Kör nokta bilgi sistemi, geleneksel ayna tabanlı tespit yöntemlerini hem doğruluk hem de güvenilirlik açısından geride bırakacak şekilde, en son teknolojiye dayalı radar teknolojisini kullanır. Bu gelişmiş radar ağı, aracın yan ve arka kısımlarında stratejik olarak yerleştirilmiş çoklu sensörlerden oluşur ve aracı fiziksel sınırlarının birkaç metre ötesine kadar uzanan görünmez bir koruma bariyeri oluşturur. Milimetre dalga radarı, 76-81 GHz frekans aralığında çalışarak, aydınlatma koşullarına, hava koşullarına veya çevresel engellere bakılmaksızın nesnelerin tespitinde olağanüstü hassasiyet sağlar. Karanlık, parlaklık veya yağmur gibi durumlarda optik sistemlerin karşılaştığı zorluklara karşın, radar tabanlı kör nokta bilgi sistemleri çeşitli zorlu koşullar altında tutarlı performans sergiler. Teknoloji, farklı nesne türlerini birbirinden ayırır; çarpışma riski oluşturan hareketli araçlar, motosikletler ve yayalar üzerinde odaklanırken, beton bariyer gibi sabit unsurları filtreler. Gelişmiş sinyal işleme algoritmaları, yansıyan radar dalgalarındaki Doppler kaymalarını analiz ederek yalnızca nesnenin varlığını değil, aynı zamanda göreli hızını ve yön tahminlerini de hesaplar. Bu tahmine dayalı yetenek, kör nokta bilgi sisteminin çarpışma olasılığını değerlendirmesini ve tehdit şiddetine göre kademeli uyarılar vermesini sağlar. Radar sensörleri, etkileyici tespit menzillerine sahiptir; tipik olarak aracın arkasında 70 metreye kadar ve her iki yanında 3-4 metreye kadar alanları izler, böylece tüm kritik kör nokta bölgelerinin kapsamlı bir şekilde izlenmesini sağlar. Modern sistemler, birbiriyle koordine çalışan çoklu radar ünitesi içerir ve bu ünitelerin örtüşen tespit alanları, kaplama boşluklarını ortadan kaldırır ve yedekli güvenlik önlemleri sağlar. Teknoloji, farklı araç hızlarına otomatik olarak uyarlanır; tespit hassasiyetini ve uyarı zamanlamasını sürüş koşullarına göre ayarlar. Otoyol hızlarında sistem, araçlar arasındaki yaklaşım oranlarının yüksek olması nedeniyle izleme mesafelerini uzatırken, şehir içi sürüş senaryolarında bisikletler veya motosikletler gibi daha küçük nesnelere artmış hassasiyetle kısa menzilli tespit üzerine odaklanır. Radar tabanlı yaklaşım, özellikle geleneksel aynaların kamyon ve otobüs tasarımlarında doğası gereği büyük olan kör nokta alanlarını yeterince kapsayamadığı ticari taşıtlar için özellikle etkilidir.