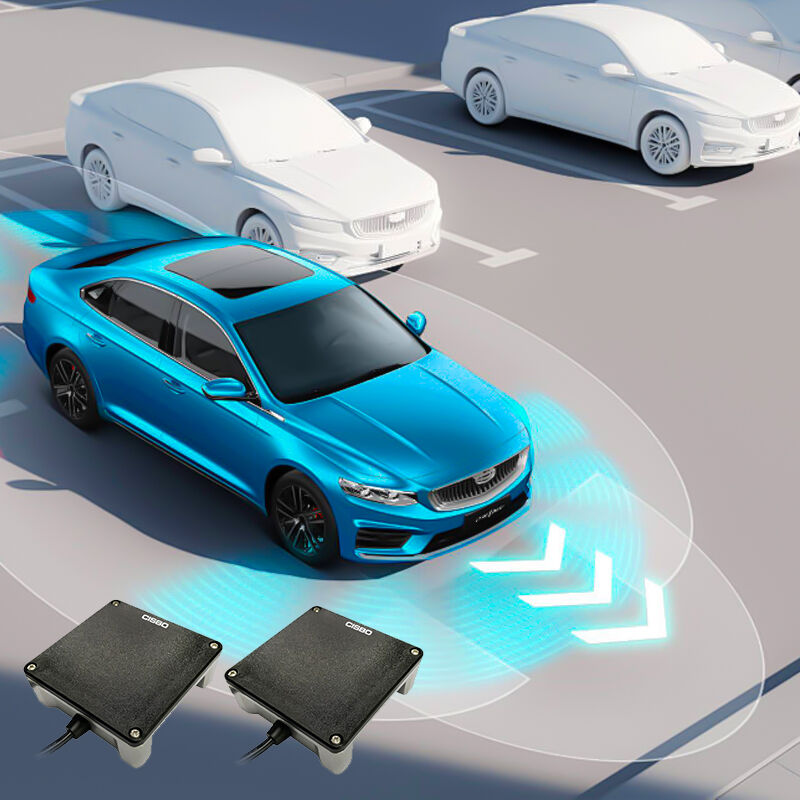
Tecnología avanzada de múltiples sensores para cobertura completa
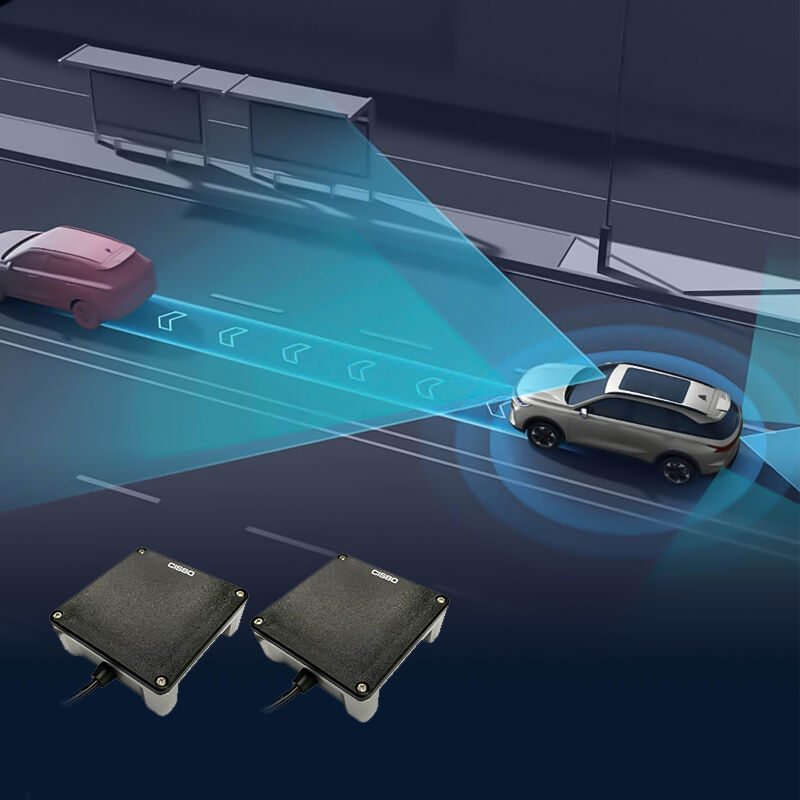
El sistema de detección de puntos ciegos para automóviles emplea una sofisticada tecnología multisensorial que crea una red de seguridad invisible alrededor de su vehículo, utilizando una combinación de ondas de radar, cámaras y sensores ultrasónicos para lograr una cobertura integral. Este avanzado enfoque de fusión de sensores garantiza que ningún vehículo u obstáculo pase desapercibido en las zonas críticas de puntos ciegos que los espejos tradicionales no pueden supervisar de forma efectiva. Los componentes de radar del sistema de detección de puntos ciegos para automóviles operan a frecuencias específicamente diseñadas para atravesar diversas condiciones meteorológicas, manteniendo un rendimiento constante durante la lluvia, la nieve, la niebla o las tormentas de polvo, que normalmente afectarían los métodos visuales de detección. Estos sensores emiten ondas continuas que rebotan en objetos cercanos, calculando con notable precisión la distancia, la velocidad y la trayectoria. Los elementos de cámara proporcionan confirmación visual y capacidades de clasificación de objetos, distinguiendo entre vehículos, motocicletas, bicicletas y peatones para emitir niveles de alerta adecuados. Los sensores ultrasónicos añaden detección de proximidad cercana en escenarios de baja velocidad, asegurando una cobertura integral durante la navegación en estacionamientos y en condiciones de conducción urbana. La integración de estos múltiples tipos de sensores crea redundancia, lo que mejora la fiabilidad del sistema y reduce las falsas alarmas mediante la verificación cruzada de los datos de detección. El sistema de detección de puntos ciegos para automóviles procesa esta información multisensorial mediante potentes computadoras integradas que analizan miles de puntos de datos por segundo, generando mapas tridimensionales en tiempo real del entorno circundante. Algoritmos de aprendizaje automático mejoran continuamente la precisión de la detección al aprender de diversos escenarios de conducción y condiciones ambientales. El sistema se calibra automáticamente para tener en cuenta distintas condiciones de carga, acoplamiento de remolques o configuraciones de carga que puedan afectar la posición de los sensores. Técnicas avanzadas de filtrado eliminan las interferencias causadas por objetos estáticos, como barreras de seguridad, soportes de puentes o vehículos estacionados, centrándose únicamente en amenazas móviles reales. La disposición de sensores cubre habitualmente zonas que se extienden desde el paragolpes trasero hasta varios pies por delante de la posición del conductor, garantizando una cobertura lateral completa durante los momentos más críticos de las maniobras de cambio de carril.