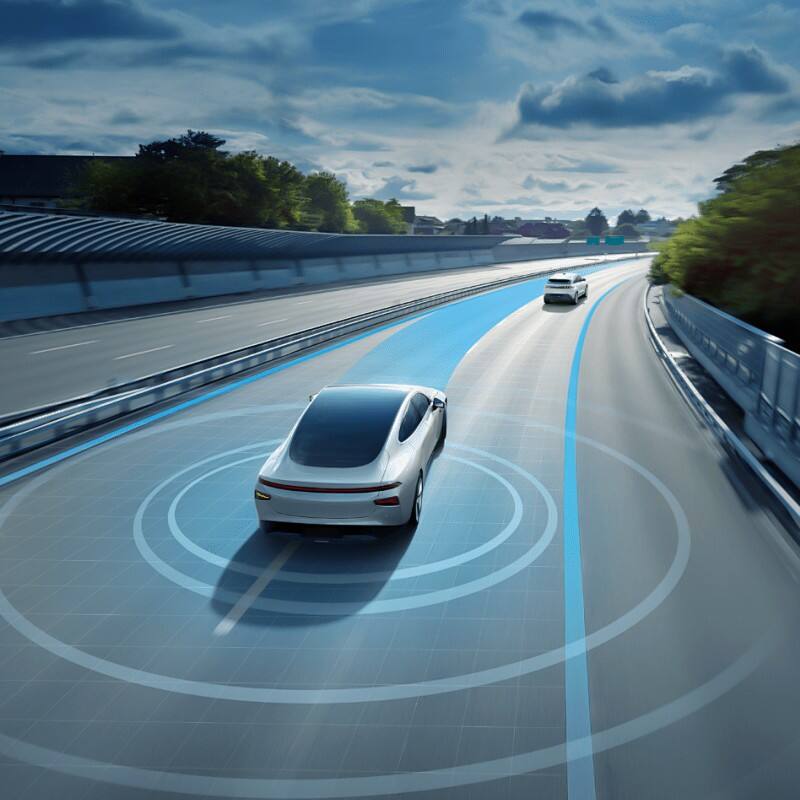
Tecnologia avanzata a multi-sensore per una copertura completa
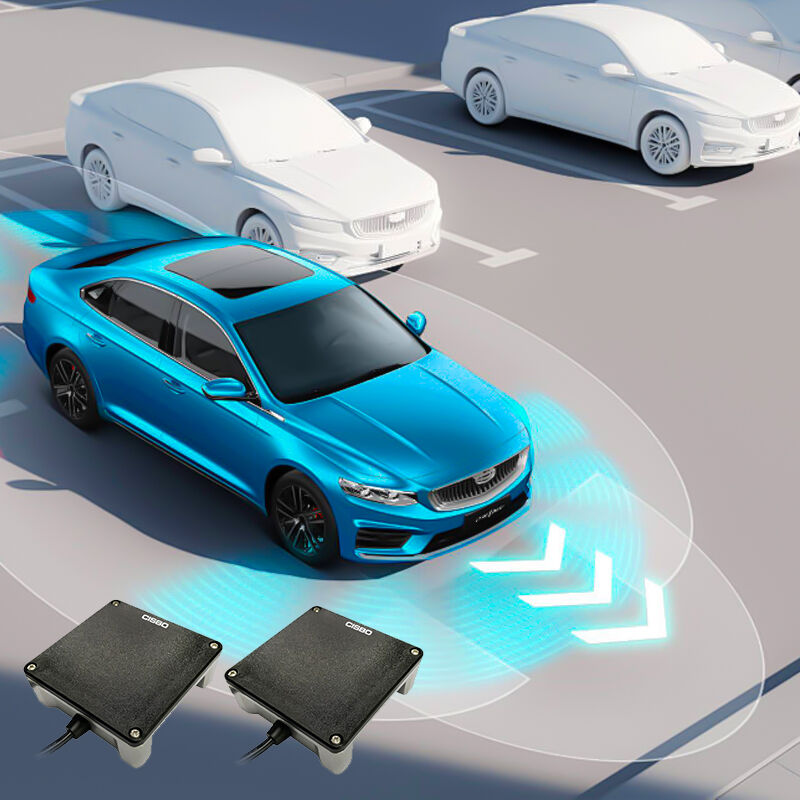
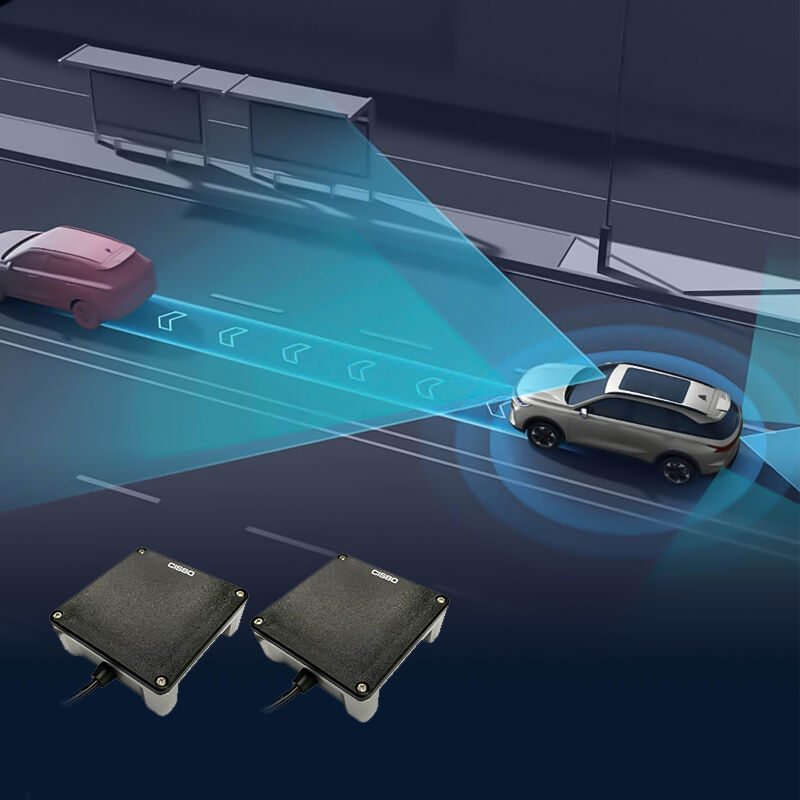
Il sistema di rilevamento dei punti ciechi per autovetture impiega una sofisticata tecnologia multisensore che crea una rete di sicurezza invisibile intorno al veicolo, utilizzando una combinazione di onde radar, telecamere e sensori a ultrasuoni per garantire una copertura completa. Questo avanzato approccio di fusione sensoriale assicura che nessun veicolo o ostacolo rimanga indetectato nelle zone critiche dei punti ciechi, che gli specchi retrovisori tradizionali non riescono a monitorare efficacemente. I componenti radar del sistema di rilevamento dei punti ciechi per autovetture operano a frequenze specificamente progettate per penetrare diverse condizioni meteorologiche, mantenendo prestazioni costanti durante pioggia, neve, nebbia o tempeste di polvere, che normalmente comprometterebbero i metodi di rilevamento visivo. Tali sensori emettono onde continue che rimbalzano sugli oggetti circostanti, calcolando con notevole precisione distanza, velocità e traiettoria. Gli elementi ottici forniscono una conferma visiva e capacità di classificazione degli oggetti, distinguendo tra autovetture, motocicli, biciclette e pedoni per fornire livelli di allerta adeguati. I sensori a ultrasuoni aggiungono il rilevamento a breve distanza per scenari a bassa velocità, garantendo una copertura completa durante la navigazione nei parcheggi e nelle condizioni di guida urbana. L’integrazione di questi diversi tipi di sensori crea una ridondanza che migliora l’affidabilità del sistema, riducendo al contempo i falsi allarmi grazie alla verifica incrociata dei dati rilevati. Il sistema di rilevamento dei punti ciechi per autovetture elabora queste informazioni multisensore tramite potenti computer di bordo che analizzano migliaia di punti dati al secondo, generando mappe tridimensionali in tempo reale dell’ambiente circostante. Algoritmi di apprendimento automatico migliorano continuamente l’accuratezza del rilevamento apprendendo da vari scenari di guida e condizioni ambientali. Il sistema si calibra automaticamente per tenere conto di diverse condizioni di carico, dell’aggancio di un rimorchio o di configurazioni di carico che potrebbero influenzare la posizione dei sensori. Tecniche di filtraggio avanzate eliminano le interferenze provenienti da oggetti fissi, come guardrail, supporti di ponti o veicoli parcheggiati, concentrandosi sugli allarmi relativi a minacce in movimento effettive. L’array di sensori copre generalmente zone che si estendono dal paraurti posteriore fino a diversi piedi davanti alla posizione del conducente, garantendo una copertura laterale completa nei momenti più critici delle manovre di cambio corsia.